
Check out Offroad Robotics robots Ibex and Husky at the opening of the new Mitchell Hall at Queen’s University, which is home to Ingenuity Labs!
uGPS Research Featured at #SciTechMuseum
Our uGPS project research and technology is now featured in the From Earth to Us exhibit at the Canada Science and Technology Museum, Ottawa, ON. This work began at MDA Inc., and was developed through research projects at Carleton University, Queen’s University, and with industry partners that included first MDA, followed by Barrick Gold Corporation and Peck Tech Consulting.
Super fun to visit the #SciTechMuseum today to see our research and technology on display in the "From Earth to Us" exhibit! https://t.co/KAkvRVMWwK pic.twitter.com/OUHbgvagok
— Joshua Marshall (@queensprofessor) August 8, 2018
Offroad Robotics at #CIMBC2018

Last night, Offroad Robotics and Queen’s alumni were on the top of Bentall 5 in downtown Vancouver at #CIMBC2018 to celebrate the kick-off of Queen’s Mining‘s 125-th Anniversary! Thanks to Queen’s FEAS Dean Kevin Deluzio, Jordan, Shelby, Stuart and the gang at RockMass Technologies, and Glen Turner (Offroad/MSL alumnus) from Motion Metrics for attending. And, thanks to Don Lindsay (CEO, Teck Resources) for hosting everyone. Looking forward to a new year of robotics R&D!
Great evening with @rockmasstech and @KDeluzio at the @QueensEngineer Mining 125th Anniversary kick-off in Vancouver #CIMBC2018. Thanks to @TeckResources for hosting the event! pic.twitter.com/NblnAeZ3rS
— Joshua Marshall (@queensprofessor) May 8, 2018
Offroad’s Lukas Dekker Joins MacLean Engineering
Congratulations to Offroad Robotics researcher Lukas Dekker, who very successfully defended his Master’s thesis entitled Industrial-Scale Autonomous Wheeled-Vehicle Path Following by Combining Iterative Learning Control with Feedback Linearization on April 26, 2018. In May 2018, Lukas will join a new field robotics and mining technology effort underway at MacLean Engineering in Collingwood, ON.
MSL’s Rob Hewitt Joins NASA’s Jet Propulsion Laboratory

Congratulations to MSL’s Rob Hewitt, who successfully defended his PhD thesis last month, entitled Intense Navigation: Using Active Sensor Intensity Observations To Improve Localization and Mapping. Rob is now a Postdoctoral Research Scientist in the Computer Vision Group at NASA’s Jet Propulsion Laboratory. His research focuses on visual-inertial localization in environments with challenging lighting conditions where traditional algorithms fail.
MSL at IROS 2017
We have been at IROS 2017 this week, where Lukas Dekker did a fantastic job presenting our work on the combination of ILC and feedback linearization for path following as applied to large vehicles. Check out the paper Industrial-scale autonomous wheeled-vehicle path following by combining iterative learning control with feedback linearization, which was a collaboration between MSL and the Rocktec Automation Division of Atlas Copco Rock Drills AB in Örebro, Sweden.

Marc Gallant Nominated for Governor General’s Award
Congratulations to MSL alumnus Marc Gallant, now with Quanergy Systems, who was recently nominated by Queen’s University’s Department of Electrical and Computer Engineering for the prestigious Governor General’s Academic Gold Medal for his research in robotic geotechnical and his thesis Axis Mapping: The Estimation of Surface Orientations and its Applications in Vehicle Localization and Structural Geology.

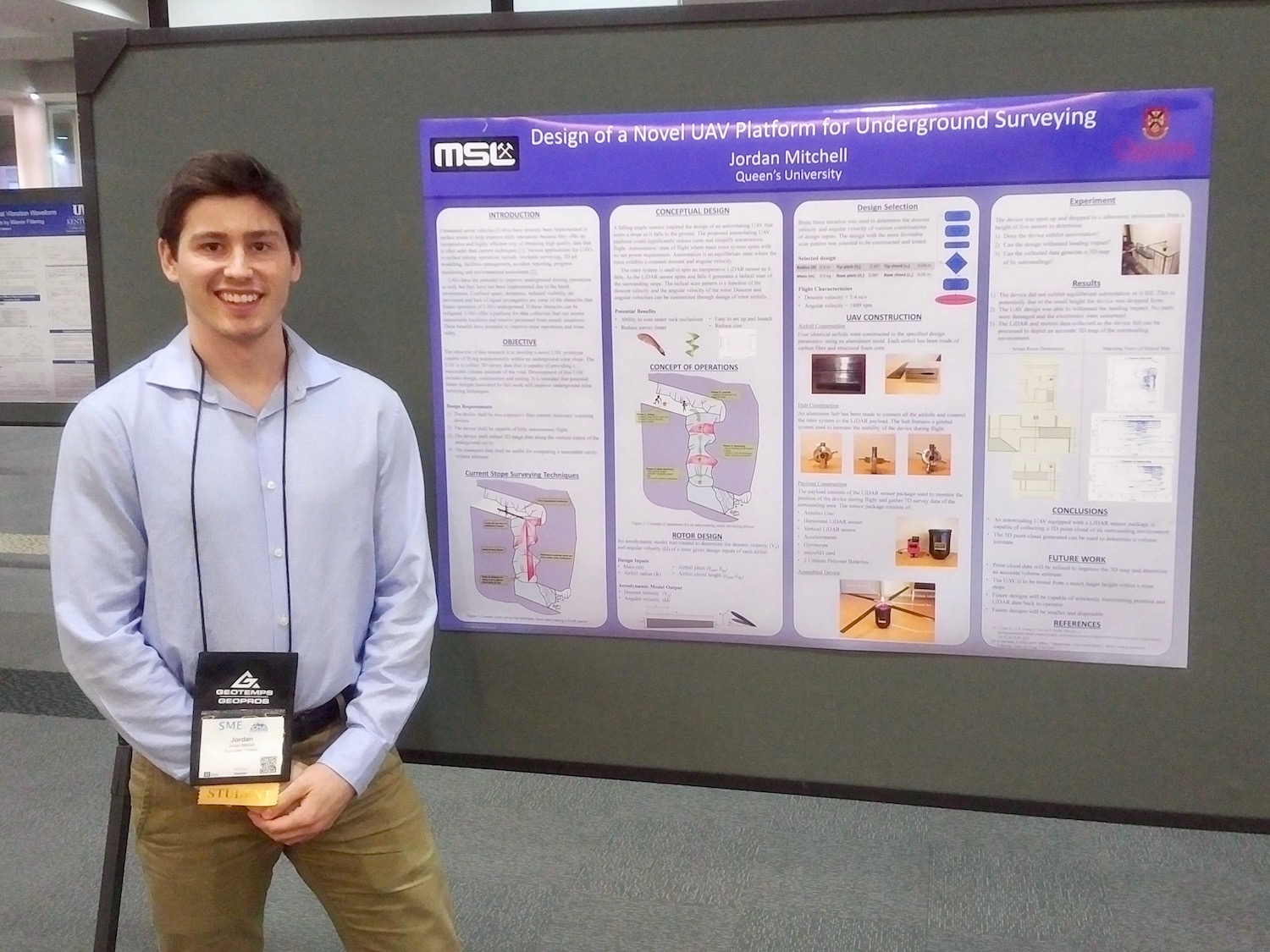
Jordan Mitchell Places 3rd at SME Poster Competition
Congrats to MSL’s Jordan Mitchell for placing 3rd in this year’s poster competition at the 2017 SME Annual Conference & Expo and CMA’s 119th National Western Mining Conference & Exhibition last week in Denver, CO! Jordan also recently placed 1st at the 2017 CIM Conference & Exhibition‘s student poster competition in Montreal, QC.
Fully Loaded and Super Speedy Underground Vehicles

 This year (August 2016 to July 2017) several MSL researchers including Joshua Marshall, Heshan Fernando, Jordan Mitchell, and Lukas Dekker are working full-time from Örebro, Sweden! This work is part of a unique collaboration between Queen’s MSL, Örebro University‘s Centre for Applied Autonomous Sensor Systems, and Atlas Copco Rock Drill AB (Örebro, Sweden), and is jointly funded by NSERC in Canada and the Swedish Knowledge Foundation.
This year (August 2016 to July 2017) several MSL researchers including Joshua Marshall, Heshan Fernando, Jordan Mitchell, and Lukas Dekker are working full-time from Örebro, Sweden! This work is part of a unique collaboration between Queen’s MSL, Örebro University‘s Centre for Applied Autonomous Sensor Systems, and Atlas Copco Rock Drill AB (Örebro, Sweden), and is jointly funded by NSERC in Canada and the Swedish Knowledge Foundation.
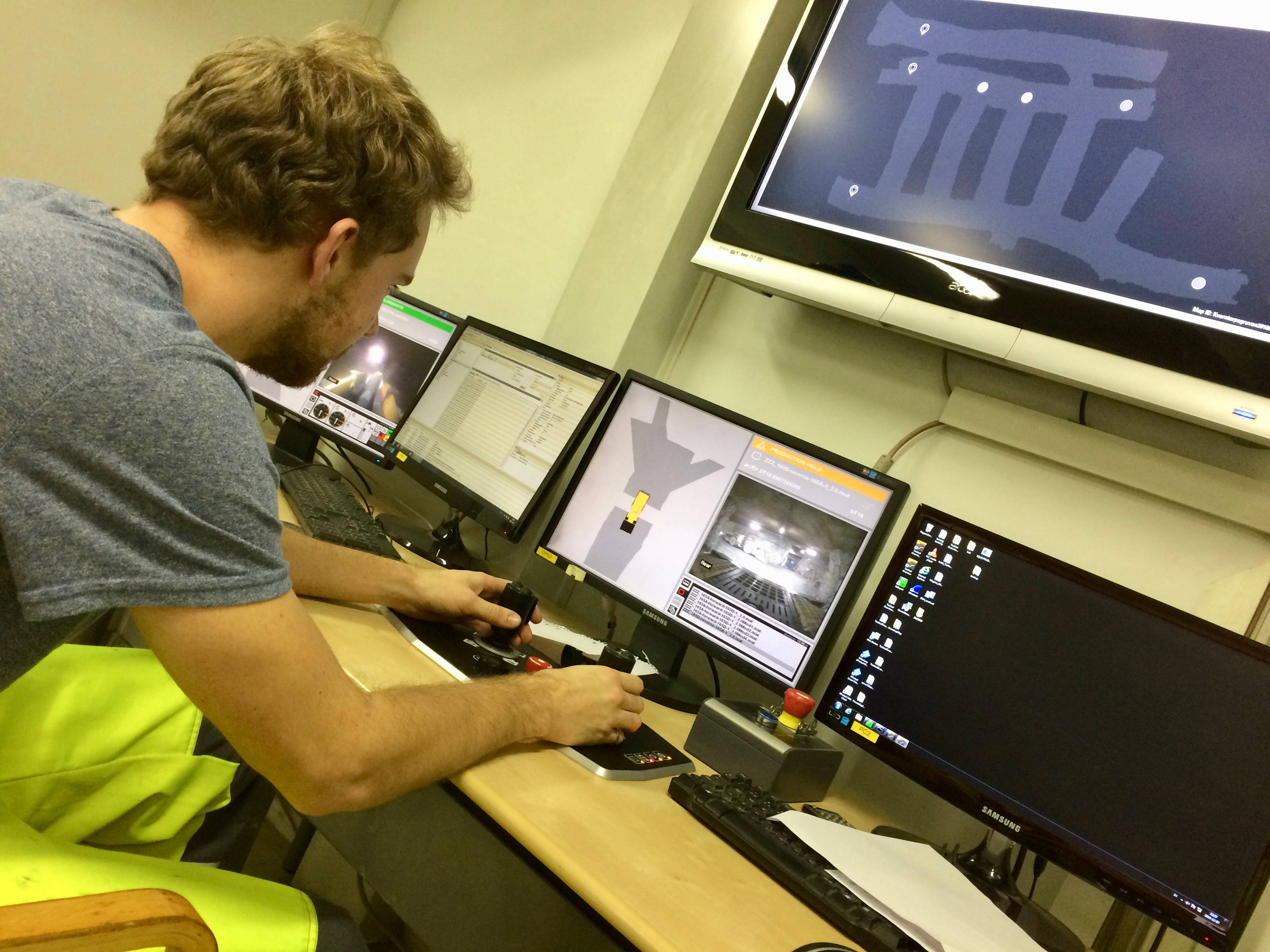
We are now half-way there and so far we have had some really great success. Our achievements are in no small part due to generous and unprecedented access to Atlas Copco’s Kvarntorp underground test mine and use of their fully-equipped and automation-ready ST14 and ST18 LHD machines! We have also made some wonderful new friends and are looking forward to many years of continued work together.
MapKey Auto-Rotating Cavity Scanner
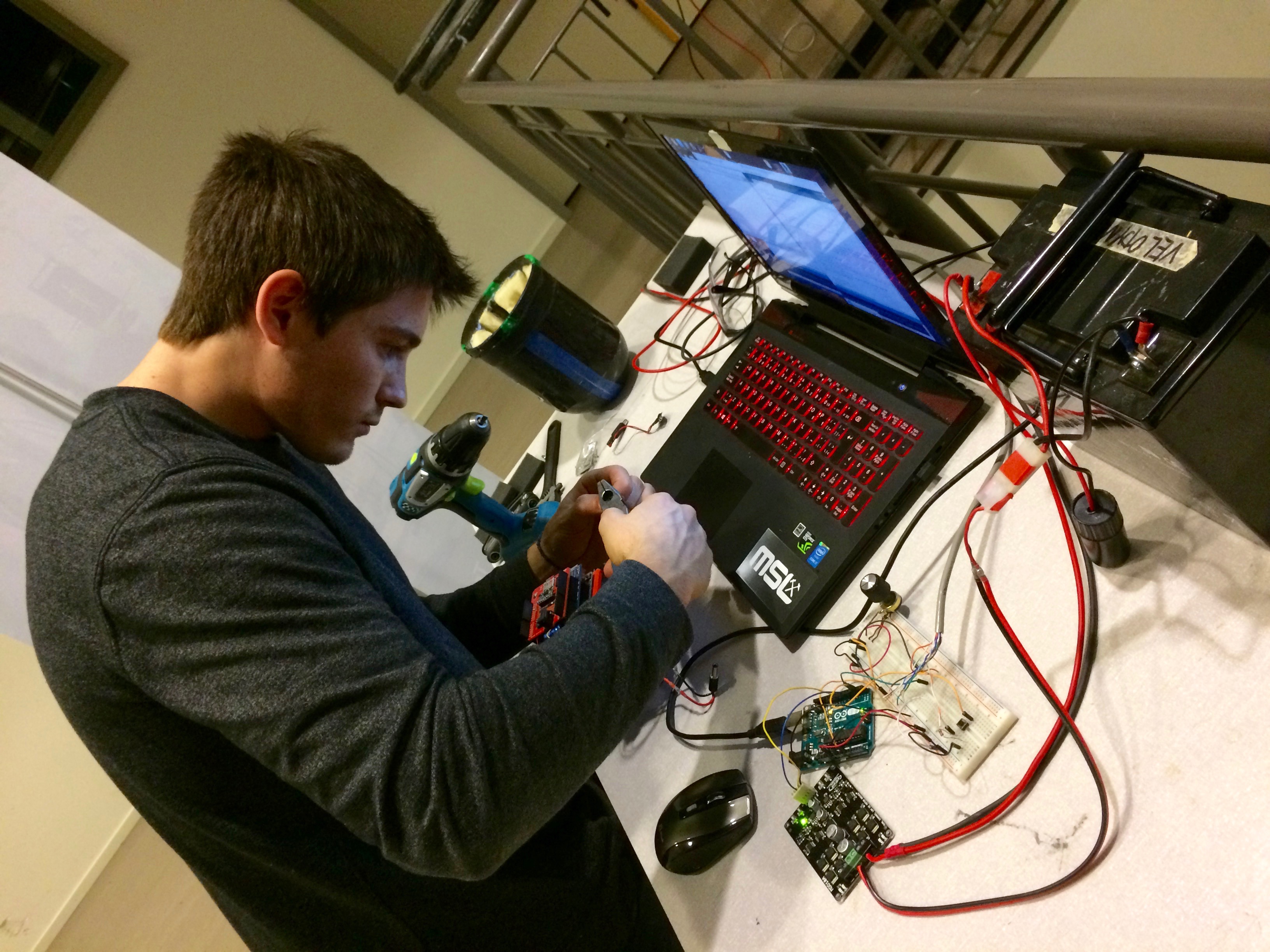 Jordan Mitchell is leading the development of our MapKey auto-rotating cavity scanner concept, prototyping, and initial field testing, which is happening on the Örebro University campus in collaboration with AASS.
Jordan Mitchell is leading the development of our MapKey auto-rotating cavity scanner concept, prototyping, and initial field testing, which is happening on the Örebro University campus in collaboration with AASS.
J. M. Mitchell and J. A. Marshall. Design of a novel auto-rotating UAV platform for underground mine cavity surveying. To appear in Proceedings of the 2017 SME Annual Conference & Expo and CMA’s 119th National Western Mining Conference & Exhibition, Denver, CO, February 2017.
Auto-Tunable Robotic Loading
 Heshan Fernando is leading the development of automatic tuning algorithms for autonomous loading of fragmented rock (see this CIM Magazine article about our ongoing work on this with Atlas Copco), which is happening in collaboration with Atlas Copco Rock Drills AB and in conjunction with field work at the Kvarntorp underground facility. Heshan is also working Atlas Copco engineers and software developers to create a “load-assist” version of our technology to help operators that use radio-remote controlled LHDs.
Heshan Fernando is leading the development of automatic tuning algorithms for autonomous loading of fragmented rock (see this CIM Magazine article about our ongoing work on this with Atlas Copco), which is happening in collaboration with Atlas Copco Rock Drills AB and in conjunction with field work at the Kvarntorp underground facility. Heshan is also working Atlas Copco engineers and software developers to create a “load-assist” version of our technology to help operators that use radio-remote controlled LHDs.
ILC+FBL for Fast Autonomous Driving
Lukas Dekker is leading research on a new approach to Iterative learning-based path following for high-accuracy and high-speed autonomous driving of underground mining vehicles. This work is being carried out using Atlas Copco ST14 and ST18 underground loaders and also at the Kvarntorp underground facility.
MSL’s Contribution to the Handbook of Robotics
The new Springer Handbook of Robotics is out, and what better place to read Chapter 59: Robotics in Mining—written in part by MSL’s Joshua Marshall—than underground on a really big mining robot.

#handbookofrobotics is out! What better place to read Chapter 59 than underground on a really big mining robot! pic.twitter.com/wBv3xKk3cA
— Joshua Marshall (@queensprofessor) October 1, 2016